Railway Signalling & Communication Engineering ›› 2024, Vol. 21 ›› Issue (12): 81-88.DOI: 10.3969/j.issn.1673-4440.2024.12.013
Previous Articles Next Articles
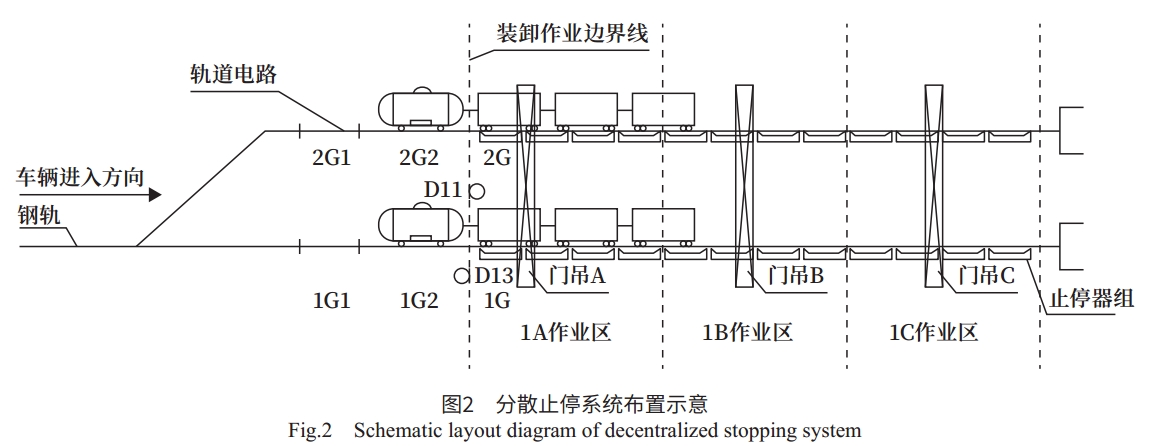
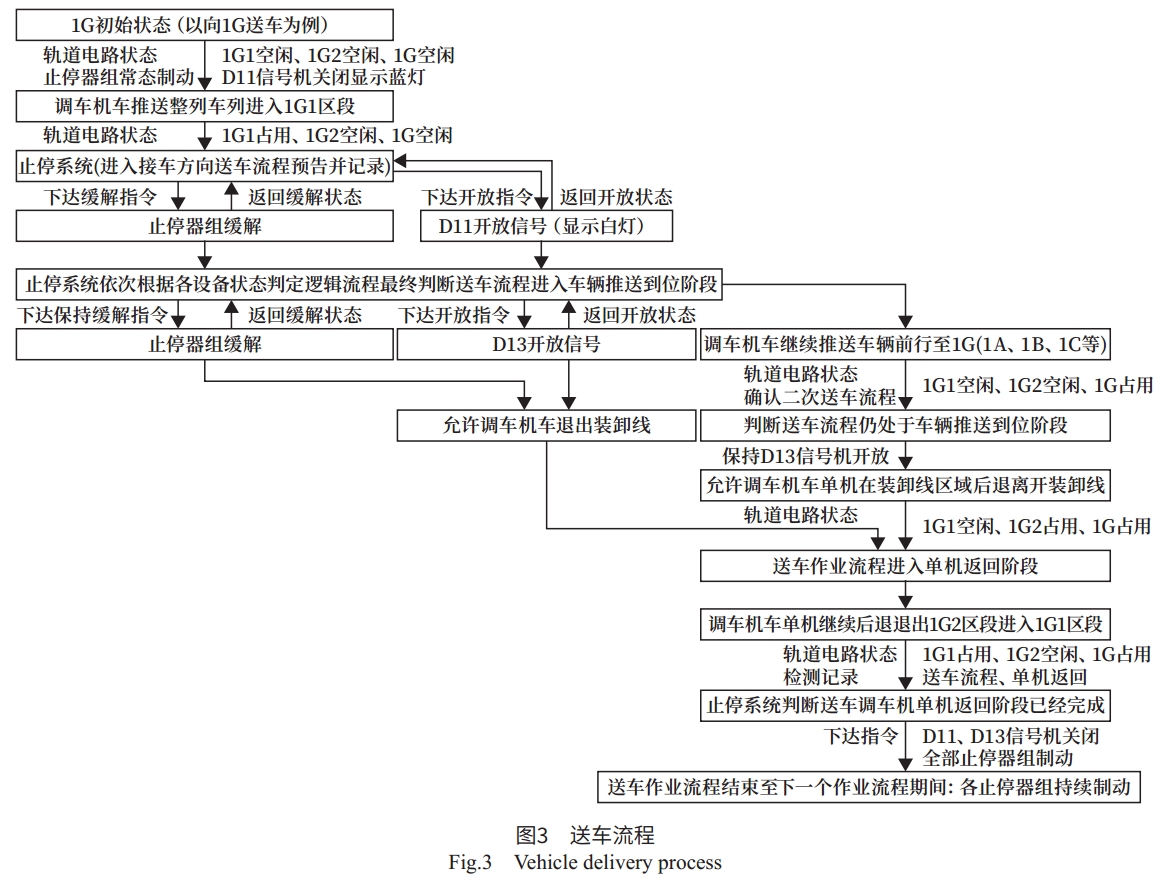
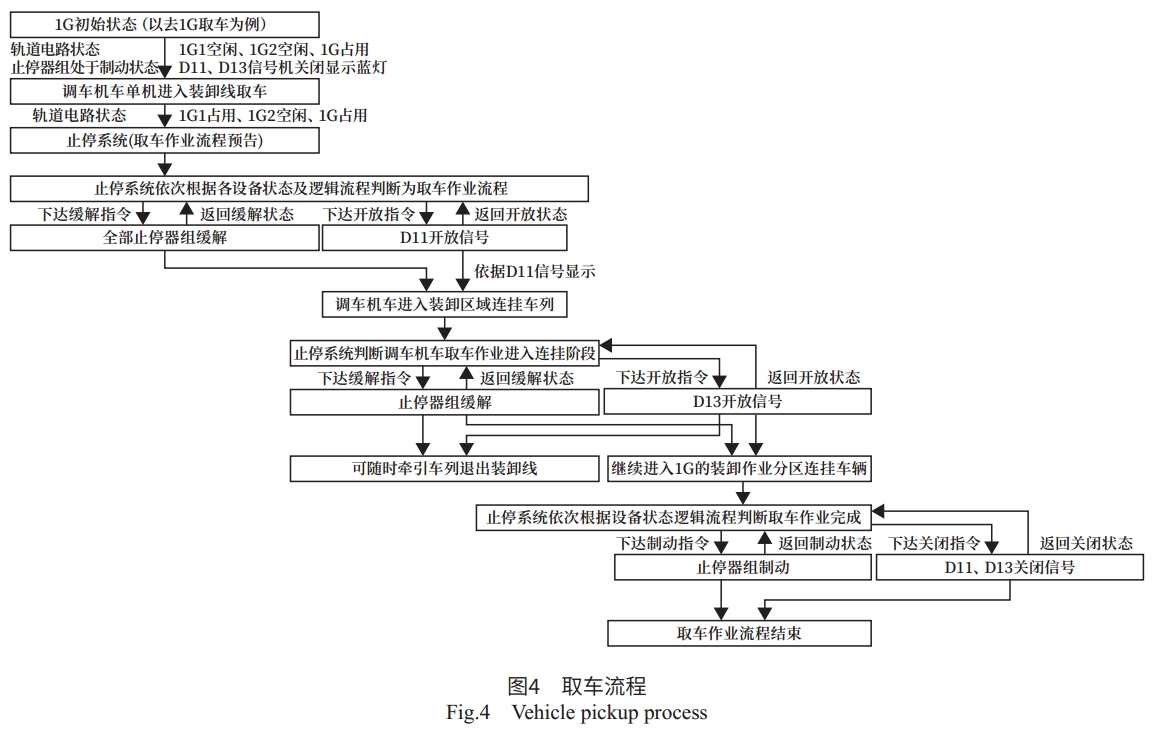
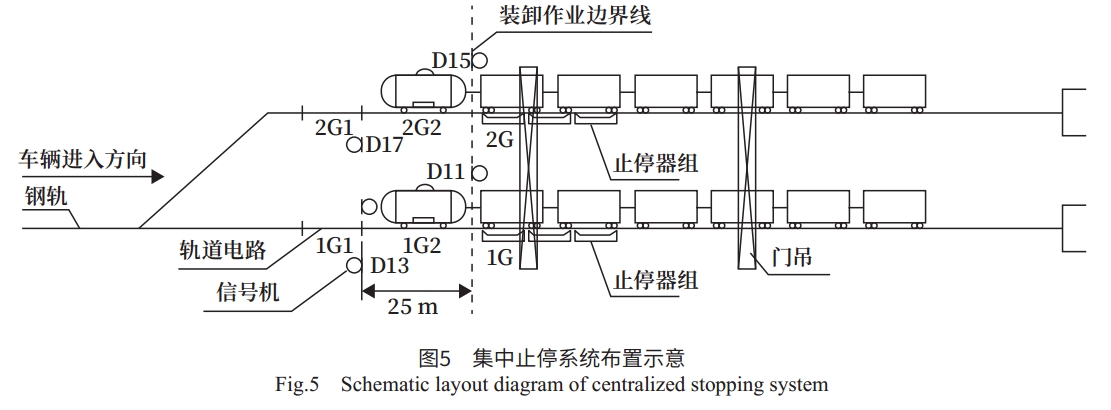
Research on System and Method of Decentralized Stopping for Vehicle Loading and Unloading Operations in Railway-Water Intermodal
Ma Xiaochen
- China Railway Wuhan Survey and Design Institute Co., Ltd, Wuhan 430074, China
铁水联运车辆装卸分散止停系统及方法研究
马晓晨
- 中铁武汉勘察设计院有限公司, 武汉 430074